 |
ZED Open Capture
v0.6.0
Low level camera driver for the ZED stereo camera family
|
|
ZED Open Capture
v0.6.0
Low level camera driver for the ZED stereo camera family
|
The ZED Open Capture library allows the low level control of ZED, ZED Mini and ZED 2 camera. The library provides methods to access raw video frames, to control the video parameters and to acquire raw data from the internal sensors (only ZED Mini, ZED2, and ZED2i). A synchronization mechanism is provided to get the correct sensor data associated to each video frame.
Note: The provided data are not calibrated, images are not rectified in a stereoscopic way, IMU data may drift or be misaligned. Calibration data can be accessed using the ZED SDK.
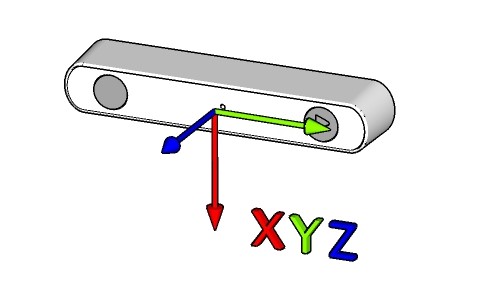
The coordinate system is only used for sensors data (especially for IMU). The given IMU data are expressed in the RAW/IMU coordinate system as show below
Install GCC compiler and build tools
$ sudo apt install build-essential
Install CMake build system
$ sudo apt install cmake
Install HIDAPI and LIBUSB libraries:
$ sudo apt install libusb-1.0-0-dev libhidapi-libusb0 libhidapi-dev
Install OpenCV to compile the examples
$ sudo apt install opencv-dev
To be able to access the USB you must install the udev rule contained in the udev folder:
$ cd udev $ bash install_udev_rule.sh $ cd .. $ udevadm trigger
$ git clone https://github.com/stereolabs/zed-open-capture.git $ cd zed-open-capture
$ mkdir build $ cd build $ cmake .. $ make -j$(nproc)
$ mkdir build $ cd build $ cmake .. -DBUILD_EXAMPLES=OFF $ make -j$(nproc)
$ mkdir build $ cd build $ cmake .. -DBUILD_SENSORS=OFF $ make -j$(nproc)
$ mkdir build $ cd build $ cmake .. -DBUILD_SENSORS=OFF -DBUILD_EXAMPLES=OFF $ make -j$(nproc)
$ mkdir build $ cd build $ cmake .. -DBUILD_VIDEO=OFF $ make -j$(nproc)
$ mkdir build $ cd build $ cmake .. -DBUILD_VIDEO=OFF -DBUILD_EXAMPLES=OFF $ make -j$(nproc)
After compiling it is possible to install the library and the examples. From inside the build folder:
$ sudo make install $ sudo ldconfig
Documentation can be locally generated in HTML format using Doxygen:
$ sudo apt-get install -y doxygen # if not previously installed $ cd doc $ ./generate_doc.sh
The local documentation will be available opening the file doc/html/index.html with a standard web browser.